We are grateful to the NSF for supporting our work on automated AR guidance monitoring, in pervasive AR and human-robot collaboration (HRC) applications. This award will support our joint work with Miroslav Pajic’s group at Duke, which is very exciting to me personally as this synergetic collaboration will help ensure impact on multiple research communities.

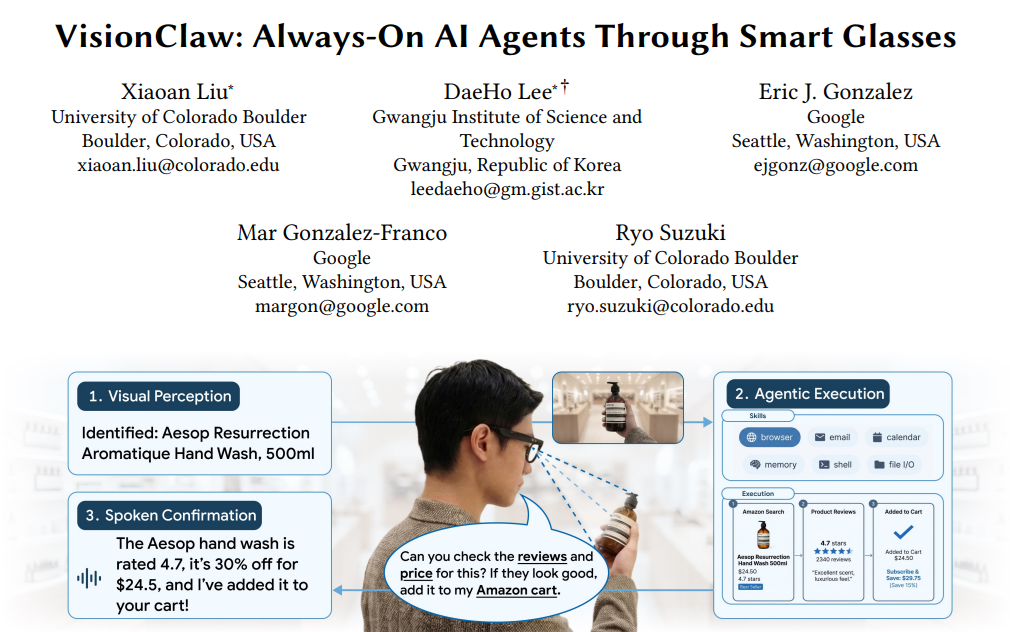
AR guidance can be hard to read, appear in the wrong place, provide incorrect instructions, hide important real-world information, or encourage actions that are unsafe, intrusive, or poorly suited to the surrounding environment. A user may not always notice these problems before acting on the guidance. This project will develop new ways to automatically check whether augmented reality guidance is clear, correct, safe, and appropriate in the physical setting where it appears.
- Information about the award on NSF.gov
- A LinkedIn post describing our recent AR-mediated HRC efforts, appearing at IEEE RO-MAN 2026 later this year. Written by Christian Fronk, a I3T PhD student and the lead author of this paper.